Category
page 1Robotic manipulators

selective compliance assembly robot arm
thumb|Serial SCARA robot
thumb|right|Parallel SCARA robot

Canadarm
Canadarm or Canadarm1 (officially Shuttle Remote Manipulator System or SRMS, also SSRMS) is a series of robotic arms that were used on the Space Shuttle orbiters to deploy, maneuver, and capture payloads. After the Space Shuttle Columbia disaster, the Canadarm was always paired with the Orbiter Boom Sensor System (OBSS), which was used to inspect the exterior of the shuttle for damage to the thermal protection system.
manipulator
mechanism designed to grasp and hold items

Dextre
thumb|Dextre on the end of Canadarm2
thumb|Dextre, as photographed by an Expedition 26 crew member
right|thumb|Dextre, as photographed by an Expedition 27 crew member
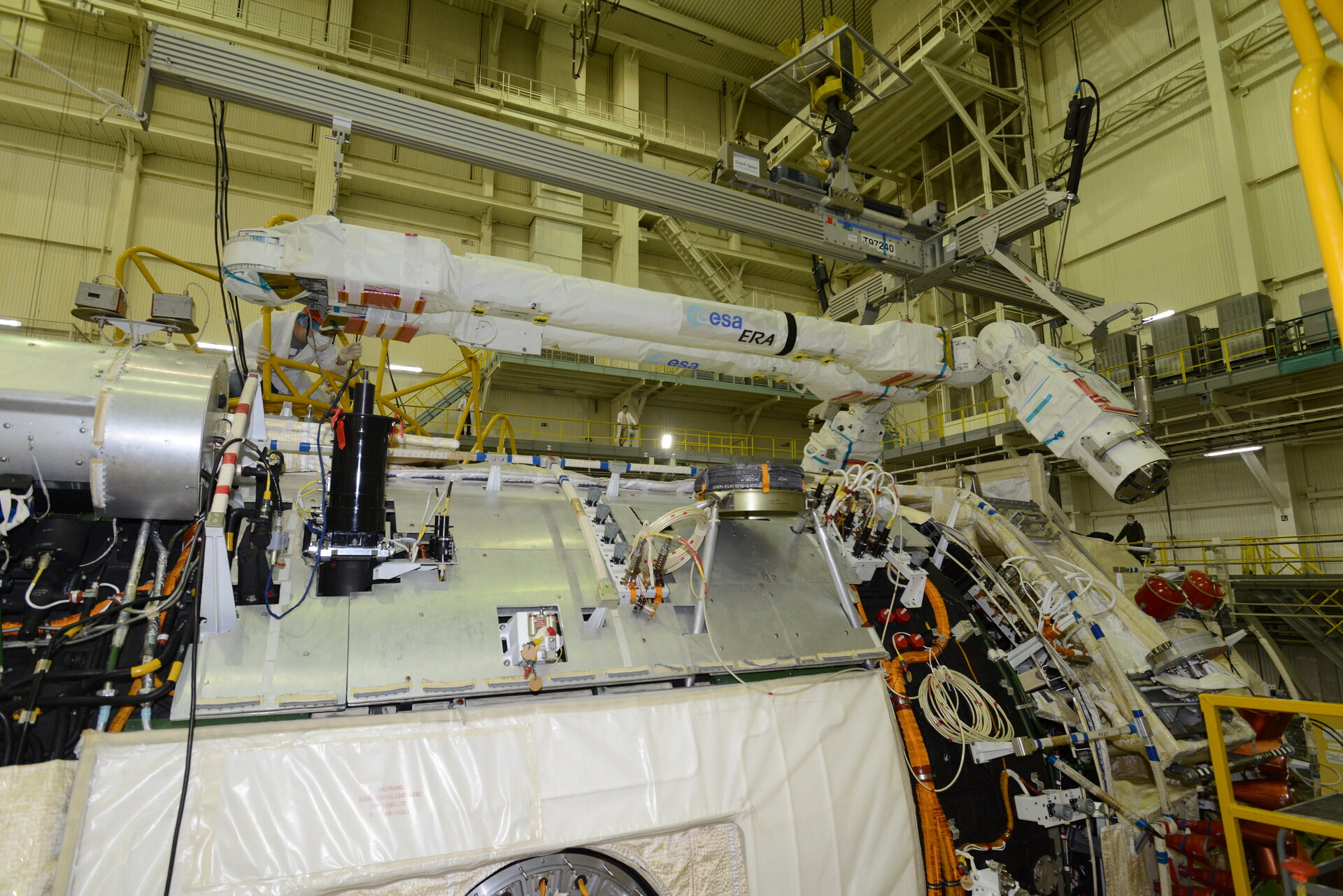
European Robotic Arm
robotic arm attached to the Nauka module of the International Space Station
robotic arm
type of mechanical arm with similar functions to a human arm
Mobile Servicing System
robotic system on board the International Space Station
Lyappa arm
System for reposition modules of "Mir" space station
Autosampler
alt=Autosampler|thumb|Autosampler
An autosampler is commonly a device that is coupled to an analytical instrument providing samples periodically for analysis. An autosampler can also be understood as a device that collects samples periodically from a large sample source, like the atmosphere or a lake, for example.