Category
page 1Analytic geometry

line
one-dimensional infinite non-curved geometric object
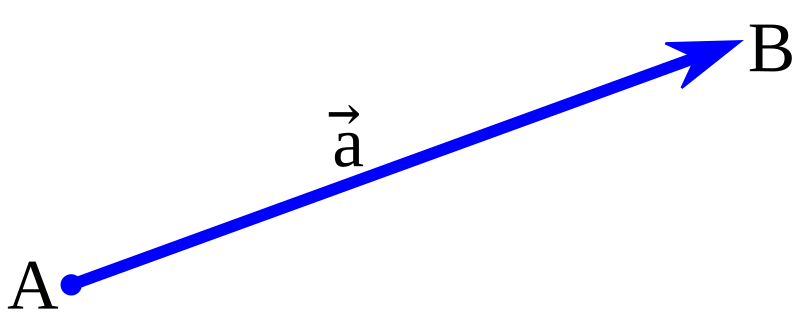
Euclidean vector
geometric object that has magnitude (or length) and direction
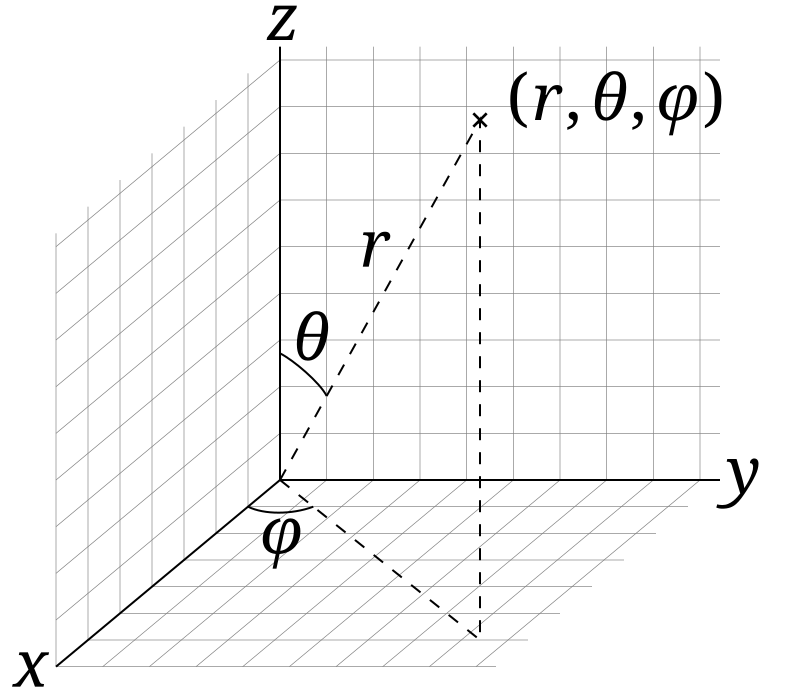
coordinate system
system for determining the position of a point
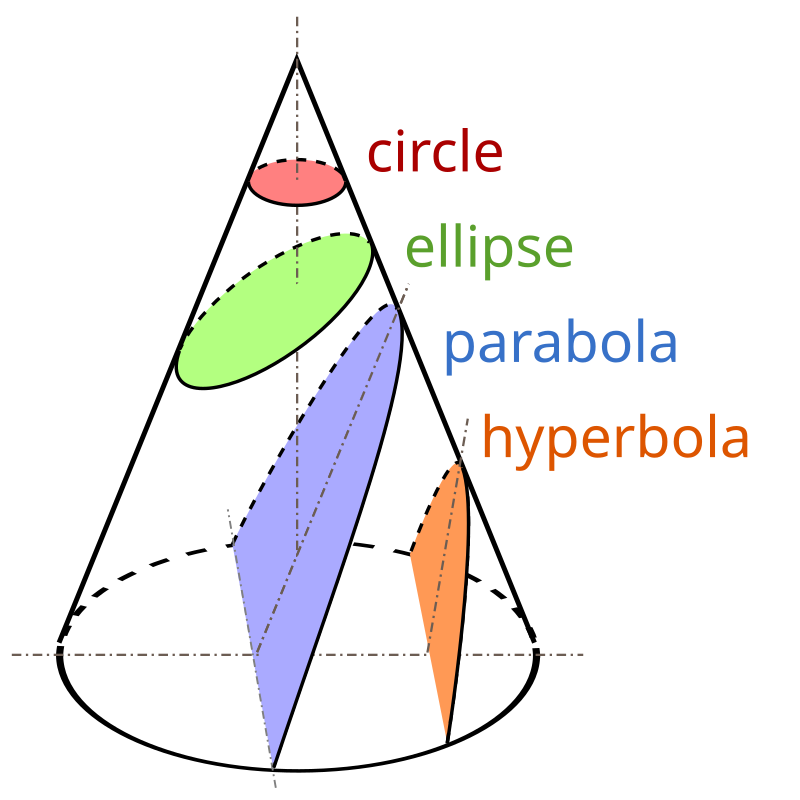
conic section
curve obtained by intersecting a cone and a plane

analytic geometry
study of geometry using a coordinate system
three-dimensional space
geometric model in which a point is specified by three parameters
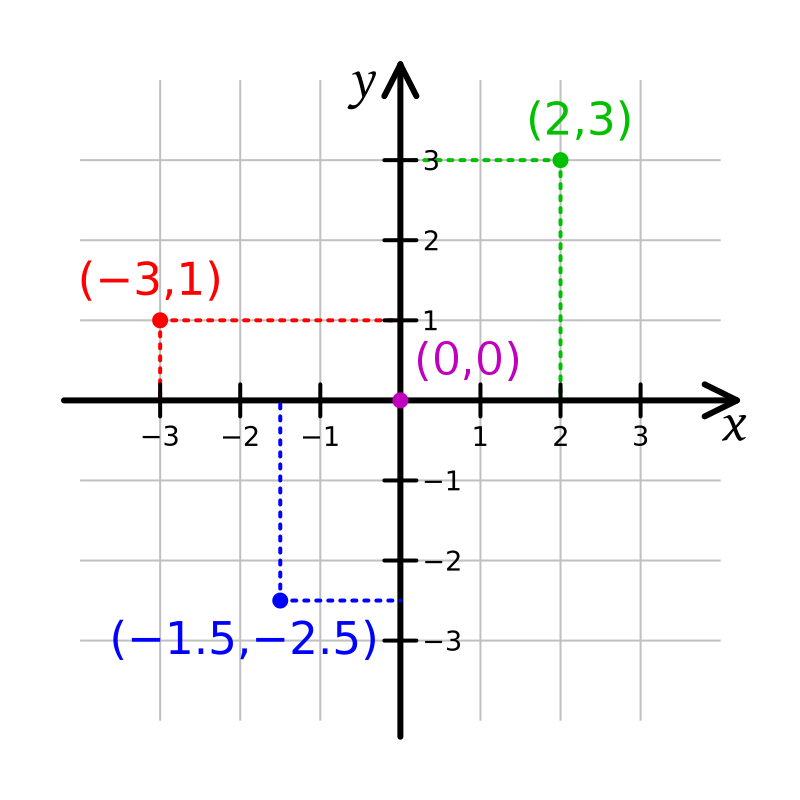
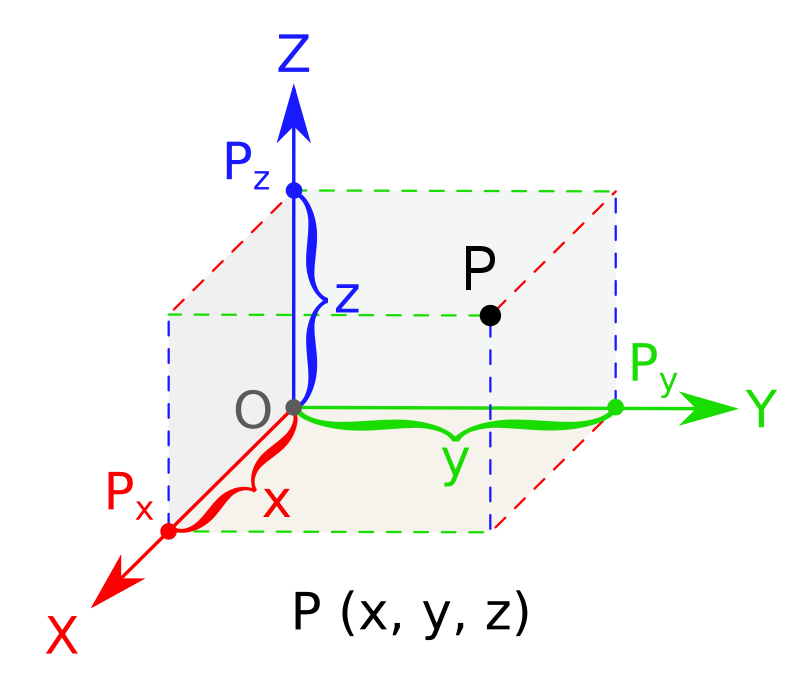
Cartesian coordinate system
coordinate system that specifies each point uniquely by a pair of real numbers called coordinates
.svg)
hyperbola
thumb|A hyperbola is an open curve with two branches, the intersection of a plane (geometry)|plane with both halves of a double cone. The plane does not have to be parallel to the axis of the cone; the hyperbola will be symmetrical in any case.|alt=The image shows a double cone in which a geometrical plane has sliced off parts of the top and bottom half; the boundary curve of the slice on the cone is the hyperbola. A double cone consists of two cones stacked point-to-point and sharing the same axis of rotation; it may be generated by rotating a line about an axis that passes through a point of

scalar product
algebraic operation that takes two equal-length sequences of numbers

surface
two-dimensional manifold, and, as such, may be an "abstract surface" not embedded in any Euclidean space

cross product
mathematical operation on two vectors giving a vector as result

slope
right|thumb|Slope: m = \frac{\Delta y}{\Delta x} = \tan(\theta)

tangent
220px|right|thumb|Tangent to a curve. The red line is tangential to the curve at the point marked by a red dot.
220px|right|thumb|Tangent plane to a sphere

unit circle
circle with radius one

asymptote
right|thumb|250px|The graph of a function with a horizontal (y = 0), vertical (x = 0), and oblique asymptote (purple line, given by y = 2x)
right|thumb|250px|A curve intersecting an asymptote infinitely many times

eccentricity
eccentricity of a conic section
inflection point
point on a continuously differentiable plane curve at which the curve crosses its tangent, that is, the curve changes from being concave to convex, or vice versa
curl
differential operator describing the rotation at a point in a 3D vector field

catenary
thumb|right|This chain, whose ends hang from two points, forms a catenary.
thumb|right|The silk on this spider web forms multiple elastic catenaries.
Euler angles
three angles introduced by Leonhard Euler to describe the orientation of a rigid body with respect to a fixed coordinate system
saddle point
stationary point that is not a local extremum

midpoint
282px|thumb|The midpoint of the segment (1, 1) to (2, 2)
Pick's theorem
formula that the area of a planar polygon whose vertices all have integer coordinates equals the number of interior integer points plus half the number of boundary integer points minus one
power of a point
relative distance of a point from a circle
ruled surface
surface through every point of which runs a straight line which equally is on the surface
envelope
family of curves in geometry
lattice
subgroup of a real vector space
radical axis
line determined by two circles
isoperimetric inequality
geometric inequality which sets a lower bound on the surface area of a set given its volume
Descartes' theorem
theorem
Helmholtz decomposition
theorem
Gramian matrix
matrix of inner products of a set of vectors

3-sphere
thumb|Stereographic projection of the hypersphere's parallels (red), meridians
(blue) and hypermeridians (green). Because this projection is conformal, the curves intersect each other orthogonally (in the yellow points) as in 4D. All curves are circles: the curves that intersect have infinite radius (= straight line). In this picture, the whole 3D space maps the surface of the hypersphere, whereas in the next picture the 3D space contained the shadow of the bulk hypersphere.
thumb|Direct projection of 3-sphere into 3D space and covered with surface grid, showing structure as stack of 3D spher
unit hyperbola
geometric figure
Vector area
Concept in 3-dimensional geometry
tangential angle
angle between the tangent line to the curve at the given point and the x-axis
Hesse normal form
representation of a plane as a normal and distance
Line coordinates
formula
orientation (vector space)
handedness of a vector space with ordered bases
Galois geometry
branch of finite geometry
algebraic geometry and analytic geometry
two closely related mathematical subjects
Line of greatest slope
steepest slope on a surface